[24-OCT-24] In this appendix to the Telemetry Manual, we present details of our telemetry system. Consult our terminology page for definitions of terms like RF, IF, LO, mixer, attenuator, dBm, and dB.
[04-MAR-16] The Subcutaneous Transmitter (A3019) provides one analog input channel by means of two flexible, insulated stainless steel subcutaneous leads (SCL). In the A3019A, this input is low-pass filtered by a three-pole active filter with roll-off of at 160 Hz and high-pass filtered by a single-pole filter with roll-off at 0.2 Hz. Its dynamic range is 20 mV. The A3019A can detect a 5-μV sinusoid of any frequency between 5 Hz and 160 Hz, and measure its amplitude with 1-μV accuracy. The A3049 is a two-channel transmitter with similar performance, depending upon how it is configured.
All transmitter models digitized at with sixteen-bit precision. The A3019A and A3028A digitize each input channel at 512 SPS. Each sample is transmitted in its own, isolated, 7-μs radio-frequency message. Transmission takes place through a dedicated loop antenna. The A3019A and A3028A transmit in the 902-928 MHz ISM band. It uses two frequencies to represent two logic levels. The messages propagate through space as radio waves. See How Antennas Work in our Technical Proposal for an explanation. The power transmitted by the antenna during the 7-μs burst is roughly 300 μW (−5 dBm).
The transmitter's analog circuits operate continuously to amplify and filter its analog signals. But the logic and RF circuits are inactive almost all the time. In the case of our A3019A, the logic and RF circuits wake up for 7 μs every 1953 μs, which is 0.36% of the time. During this 7-μs burst of activity, the transmitter converts its single analog input into a sixteen-bit number, and transmits this number, together with some synchronizing bits, the transmitter's four-bit ID, and a checksum. We call this transmission a message. The A3019A's message rate is 512 per second. Within each message, the transmitter sends bits at the bit rate. The A3019 and A3028 bit rate is 5 MBPS, or 200 ns per bit. For more details of the message encoding, see below.
The radio-frequency (RF) messages are received by our Loop Antenna (A3015). The messages are joined in the antenna by RF signals from other sources of similar frequency. The messages and the interference propagate along a coaxial cable to the Data Recorder (A3018) or Octal Data Receiver (A3027). The signal power arriving at the antenna must be at least four times (12 dB) greater than the interference power from other radio-frequency sources, and at least 25 pW (−76 dBm) if there is no interference. Interference power of 10 nW (−50 dBm) in the 902-928 MHz band is common in urban areas, at which level, the receive antenna must receive at least 40 nW, which we cannot rely upon when the transmitter is implanted in a moving animal, even if the receive antenna is no more than 30 cm from the animal. In order for reception to be reliable in the presence of 10 nW of interference, we must place the transmit and receive antennas inside a Faraday enclosure to reduce the interference power below 1 nW. Faraday enclosures such as our FE2F provide at least a factor of ×1000 (30 dB) isolation from external interference, and so make it possible to obtain reliable recordings with one antenna from up to fourteen cohabiting animals. Larger, less restrictive Faraday enclosures offer isolation of 10 dBm, and with the help of multiple, independent antennas connected to the same receiver, we obtain reliable reception despite prominent interference.
The radio signal enters the metal enclosure of the receiver and connects to the RF input of a demodulating receiver (such as the A3017). The RF messages and interference are amplified by 20 dB and passed through a bandpass filter that rejects signals outside the 902−928 MHz. What remains are the messages and ISM-band interference. These are amplified by another 20 dB and enter a mixer, which downshifts the 902-928 MHz RF signal to a 38-64 MHz intermediate-frequency (IF) signal.
The IF signal passes through three limiting amplifiers. Each provide 22 dB of gain, and limit their output. When we disconnect the antenna, the signal on IFL is random, but not quite saturated. When we connect the antenna, the RF interference in our laboratory causes IFL to saturate almost all the time. Because IFL is saturating, its amplitude is constant. Only its frequency changes. The fixed-amplitude IFL passes into a tuned circuit called the discriminator. The discriminator attenuates the lower IF frequencies, so that its output amplitude depends upon the frequency of IFL.
The discriminator output passes into a full-wave demodulator. The demodulator turns the AC signal into a signal proportional to the AC amplitude. The demodulator output is D in the S3017_2 schematic. The alternating radio frequencies of the transmitter messages appear in D as a square wave.

The D signal is mildly band-pass filtered by two RC networks to form the signal S in the S3007_1 schematic. The transmitter messages appear in S as a square wave centered about the 0-V potential.

A comparator transforms S into a logic HI when S is above 0 V, and logic LO when it is below 0 V. The comparator output is called C. The logic levels of the original transmitter message now re-appear as logic levels on C. Outside the messages, C is a random or pseudo-random sequence of logic levels. It is random when the dominant source of RF power at the antenna input is electronic noise, and pseudo-random when the dominant source is interference in the ISM band.
The C logic signal passes into the receivers's logic chip, where it is synchronized with a 40-MHz message clock. The synchronized version of C is SC. It changes only on the rising edges of the message clock. Pulses on C that take place between these rising edges do not appear in SC. The receiver monitors the stream of bits on SC, looking for messages embedded within the stream. These messages could arrive at any time. Messages can also appear in the SC bit sequence by chance, as a result of thermal noise or interference. We call these bad messages.
The receiver stores any messages it detects in its 512 KByte first-in first-out buffer as thirty-two bit records, as we defined by our telemetry message encoding. The last eight bits are a timestamp, which counts cycles of the receiver's 32.768 kHz clock.
The receiver stores clock messages 128 times per second in among the telemetry messages. The clock messages take the form of a transmitter message from a transmitter with ID zero. The sixteen-bit data of a clock message is a sixteen-bit counter that increments by one with every clock message stored. The final eight bits are a timestamp, which is always zero, because the clock messages are stored whenever the receiver's 32.768 kHz cycle counter wraps around to zero. You can think of the clock messages as being the product of a virtual transmitter with ID zero, transmitting 128 messages per second, and whose data is a counter that increments from one message to the next.
The receiver connects to the LWDAQ. The LWDAQ in turn connects to an Ethernet. Your data acquisition computer runs the LWDAQ software and communicates with the LWDAQ by TCPIP.
The LWDAQ software on your data acquisition computer uses its Receiver Instrument to download blocks of messages from the receiver's first-in first-out buffer. It plots these messages on the screen, including the clock messages. The Recorder provides you with blocks of data that cover a time interval you specify. As it acquires data, the receiver makes no effort to eliminate bad messages or insert substitute messages. Its data blocks are therefore of variable memory-size, but fixed time-duration.
The Neurorecorder Tool calls the Receiver Instrument to supply fixed time-duration data blocks. The Neurorecorder records all data downloaded from the receiver and stores it to a file. The file contains the raw values downloaded, with no processing or alterations made, and also provides a substantial metadata field for text data describing the recording. The file is arranged in our general-purpose NDF file format.
Meanwhile, the Neuroplayer will read, process, and display recordings from any NDF file, including the one that is receiving the freshly-downloaded data. We tell the Neuroplayer which channel numbers we want to reconstruct and display. Each channel corresponds to a transmitter recording. A two-channel transmitter will have two consecutive channel numbers for its two signals. Our subcutaneous transmitters have channel numbers between 1 and 222, excepting any number with remainder zero or fifteen after division by sixteen. Channel numbers with remainder zero are reserved for metadata. Channel number zero itself contains the receiver's clock messages. Channel numbers with remainder fifteen are reserved for auxiliary messages, which are solitary messages such as command acknowledgements and battery measurements. The reconstruction of each channel from the raw data involves removing bad messages and inserting substitute messages where necessary. The Neuroplayer displays the reconstructed channels and their discrete Fourier transforms. When playing back an archive, the Neuroplayer will perform processing on the signals, so as to calculate metrics for event classification, export the signal to another recording format, or determine the total power in various bands of the signal spectra.
[04-MAR-16] The bit rate is the rate at which the transmitter sends bits during one of its message transmissions. The A3019A, for example, transmits a total of 40 bit-values in 8 μs. The bit rate is 5 MBPS (megabits per second). We describe the function of these bits in the Message Encoding section here.
With the exception of a few temporary, slower versions we made for the following tests, all Stage Four and Stage Three circuits run at 5 MBPS. Here we compare the performance of the Stage Four system at 5 MBPS and 2.5 MBPS and show that the gain in operating range we make by dropping the bit rate is slight, while the loss in operating life is significant.
We set up a Demodulating Receiver (A3017) with a SAW Oscillator (A3016SO) and Data Recorder (A3007C). We connected a Dipole Antenna (A3015B) on a 240-cm (96") coaxial cable (RG58C/U). We recorded messages from a Subcutaneous Transmitter (A3013). We configure the transmitter and receiver for message transmission at 5 MBPS (200 ns per bit), then for 2.5 MBPS (400 ns per bit). The switch between bit rates requires the following changes.
We measure a variety of performance parameters for each bit rate. We present our measurements in the following table.
| 2.5 MBPS | Parameter | 5 MBPS |
|---|---|---|
| 918±4 MHz | Frequency Modulation | 918±4 MHz |
| 13 MHz | Bandwidth (90% Power) | 18 MHz |
| 12 μs | Message Duration | 8 μs |
| 108 μA | Active Current | 75 μA |
| 18 μA | Inactive Current | 18 μA |
| 15 m | Maximum Range (favorable orientation) | 10 m |
| <0.1/s | Bad Message Rate (Antenna Disconnected) | <0.1/s |
| <0.1/s | Bad Message Rate (Transmitter Inactive) | <0.1/s |
| <0.2% | Blocked Message Rate (Transmitter Adjacent to Antenna) | <0.2% |
| ≈3% | Missing Message Rate (Transmitter Moving Randomly 1 m from Antenna) | ≈2% |
| ≈15% | Missing Message Rate (Transmitter Moving Randomly 1 m from Antenna and Enclosed Between Two Hands) | ≈25% |
The 5 MBPS and 2.5 MBPS transmissions perform best with a modulation depth of ±4 MHz. The 90% power bandwidth of the 5 MBPS messages is 18 MHz, which leaves us with at least 8 MHz of extra room in the 902-928 MHz band. The power bandwidth of the 2.5 MBPS messages is 13 MHz. In theory, the narrower the bandwidth, the less likely a hole in the reception caused by interference (such as the this) will lie within the transmission bandwidth, and therefore the less likely that the transmission will be corrupted by interference.
The biggest benefit of the lower bit rate is a 50% increase in operating range. The biggest cost of decreasing the bit rate are the increase in active current. The current rises from 75 μA to 108 μA. The operating life drops from nine weeks to six weeks. Another cost of decreasing the bit rate is the increased transmission time, which means a greater probability of collisions between multiple transmitters sharing the same receiver. The probability of collision between any two transmitters on any given message transmission is 0.7% at 5 MBPS and 1.4 % at 2.5 MBPS. With ten transmitters, each would lose 7% of its samples at 5 MBPS and 14% at 2.5 MBPS. Our system can handle a 30% loss of messages. At 2.5 MBPS we would use up most of this missing message budget in the normal operation of ten transmitters.
We decided to stay with a 5 MBPS bit rate. Our collaborators at ION stated that battery life and bandwidth were more important than operating range, because in either case the operating range appears to be greater than the size of a standard rat cage.
[27-SEP-23] The subcutaneous transmitters encode ones and zeros in a frequency-modulated radio signal. The signal consists of two frequencies separated by roughly 8 MHz, and both within the 902-928 MHz band. The transmitter messages are a sequence of ones and zeros sent with Manchester Encoding. We first described the telemetry message structure here. Each message begins with eleven bits of value one (1). These bits serve two purposes. They synchronize the receiver clock with the message clock, and their exact period serves to distinguish the start of a transmitter message from random noise. The message body begins with a start bit of value zero (0). After the start bit comes the lower four bits of the transmitter's eight-bit channel number. The most significant bit comes first. The sixteen-bit sample comes next, most significant bit first. After the sample comes a four-bit completion code. The completion code is a function of the channel number, and allows us to deduce the upper four bits of the channel number from the lower four bits.
Where C is the completion code, N is the lower four bits of the channel number, and S is the upper four bits of the channel number, also called the set number. It would have been simpler to replace the completion code with the set number in the message encoding, but this completion code definition allows us to retain backward compatibility with our original four-bit channel number protocol. The four-bit system is equivalent to a system that uses only set zero. The following table gives examples of set numbers, channel numbers, and completion codes.
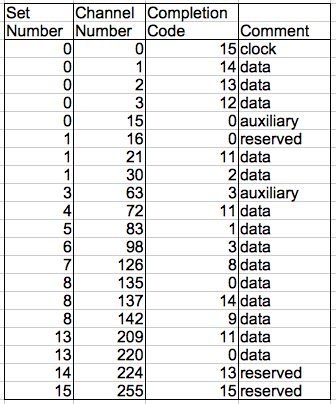
We reserve channel number 0 for clock messages, and call it the clock channel. Clock messages are generated by the receiver only. Clock messages are stored among the transmitter data messages. We reserve all channel numbers for which the lower four bits are 0 for internal use. We reserve all channel numbers for which the lower four bits are 15 for auxiliary data and we call these the auxiliary channels. Each set has its own auxiliary channel. We reserve channel numbers 225-254 for later use.

We note that the message contains no checksum to help detect corruption of the message contents. The primary means by which the receiver picks out genuine messages from interference and noise is through close examination of the timing of the signal. The encoding of the message produces a frequency transition every 195-215 ns. If a transition fails to occur, the receiver will abort decoding and look for another sequence of sychronizing bits. In our experience, each bit that satisfies the timing constraint makes it three times less likely that the message will turn out to be a bad message arising from interference or noise.
In the Receiver Instrument and the Neuroplayer Tool, we refer to signals by their channel numbers. The Receiver Instrument allows us to configure receivers to select only one set, which we specify with a set number. By default, the Receiver Instrument attempts to configure its receiver to record from all sets.
Note: We introduced channel numbers 16-222 in January 2017. A firmware upgrade will permit any receiver to record from the higher channel numbers. An Octal Data Receiver (A3027E) with firmware version ≥11 can be configured to receive from any single set zero (0) through thirteen (13), or from all sets zero through thirteen (0-13) simultaneously. We configure the receiver with the daq_set_num parameter in the Receiver Instrument. When this parameter is 0-13, the receiver accepts messages only from the corresponding set. When this parameter is "*", the receiver accepts messages from all sets.
Receivers store transmitter messages as four-byte records. The first byte is the transmitter channel number. The next two bytes are the sixteen-bit data and the last byte is a timestamp. The timestamp counts periods of the receiver's 32.768 kHz clock. The timestamp returns to zero 32768 ÷ 256 = 128 times per second. Whenever the timestamp returns to zero, the receiver inserts a clock message into the data. The clock message has zero for its channel number, this being the clock channel. Its sixteen data bits are a counter that increments by one from one clock message to the next. Its final byte contains the receiver firmware version number.
The auxiliary channels allow devices such as the Implantable Stimulator-Transpponder (IST, A3041) to transmit acknowledgments, battery measurements, and other metadata through our telemetry receivers. When the device transmits an auxiliary message, it does so using the nearest auxiliary channel above its primary channel number. The lower four bits of an auxiliary channel number are all ones, representing the number fifteen. The Receiver Instrument identifies all such messages as they arrive, and places them in a list. These four bits are followed by sixteen content bits, as in any of our telemetry messages. After the content come four completion-code bits. The leading ones and the completion code specify the auxiliary channel number. The sixteen content bits begin with a four-bit identifier. These identifier is intended to disambiguate the source of an auxiliary message. Following the four-bit identifier is a four-bit field address. The field address is intended to indicate what kind of information the source is trying to convey. The remaining eight bits of the auxiliary messagea are the data byte, which contains the information.
The Receiver Instrument supports auxiliary channels by diverting their contents into an auxiliary message list. Each element in the list is itself a list of four numbers: the channel number of the signal source that generated the auxiliary message, the field address, the data bits, and a timestamp. The timestamp is the value of the receiver's 24-bit clock, which counts up at 32.768 kHz, so that the precision of the clock is ±15 μs and the clock cycle is 512 s.
Example: Devices like ISTs have sixteen-bit identifiers. We make sure the lower four bits are never zero or fifteen. When an IST transmits an auxiliary message, it uses the auxiliary channel number we obtain by taking the lower byte of its identifier and setting the lower nibble to all ones. The IST with iedntifier 0x0B56 uses auxiliary channel 0x5F. Within the auxiliary message, the IST uses 0x6 for the identifier. We can deduce the lower eight bits of the IST identifier from the auxiliary message alone. The field address and data byte convery an acknowledgement, battery measurement, a state transition, or some other such information. Immediately following the first auxiliary message, the IST transmits another auxiliary message that acts as a confirmation. The confirmation message uses the same auxiliary channel and provides the same identifier, but its data byte is the upper byte of the IST's sixteen-bit identifier. When we receive two auxiliary messages from the same auxiliary channel within one clock tick of one another, the confirmation coming second, we are confident that we have received a genuine report from an IST, and we know that IST's identifier.
[24-OCT-24] We define reception robustness as the fraction of the time during which we receive 80% or more transmitted messages while the transmitter rotates and moves randomly at a particular range. Our sample rate and filtering is designed to tolerate the lost of 20% of the samples without loss of signal quality. We define robust reception as reception with robustness 95% or higher. A transmitter's operating range is the maximum range from the receiving antenna at which reception is robust as the transmitter moves randomly. We use Faraday enclosures and multiple, independent antennas to guarantee robust reception throughout the interior of the enclosure in all laboratory environments, regardless of ambient interference.
Radio frequency power from sources other than our subcutaneous transmitters is what we call ambient interference. If it's large enough, ambient interference can dominate the transmitter signals and cause missing messages. We block out ambient interference with Faraday enclosures. There can be holes in the conducting walls, but the holes should be less than 1% of the wavelength of the radiation if we want to block 99% of the power. In our case, the wavelength of our 900-930 MHz radio waves is 300 mm in air, so holes must be less than 3 mm in every direction. We describe our experiments with home-made Faraday enclosures in our Faraday Enclosures report. It turns out that an effective Faraday enclosure must contain an absorber, and all of ours do: a conducting foam absorber optimised for 900-930 MHz.
The noise in our receiver is the thermal and amplifier noise at the antenna input. The effective noise power at the input of our demodulating receiver is −90 dBm (see Noise and Interference). But interference power, even in a basement laboratory, is over a hundred times more powerful than this noise, at −68 dBm (see Noise and Interference).
Our telemetry signal must have power 12 dB greater than the interference in order to avoid corruption (see Foreign Interference). When we transmit power across 1 m of space from a quarter-wave antenna to a loop antenna, we lose at least 32 dB compared to connecting the power directly to the receiver circuit with a cable (see Reception). Even with our omni-directional antennas, an unfavorable relative orientation of the transmitting and receiving antennas causes a 17 dB drop in received power (see Omnidirectional Antennas and Transmit Antenna). We must also deal with reflections, or multi-path interference (see Multi-Path Interference and Radiated Power). Reflections of the main signal interfere at the receiver. We can easily get a 10-dB loss due to destructive interference. In other words: we can lose 90% of our power easily
Our subcutaneous transmitters (SCT) produce roughly −4 dBm (see Radiated Power and Modulating Transmitter). Transmission across 1 m of air with can drop our received power to −53 dBm. This −53 dBm is still 15 dB above our basemen-laboratory interference power of −68 dBm. But we must contend with multi-path interference as well, which gives rise to reception dead spots. With the antenna in an unfavorable orientation, in which we receive only −53 dB from line-of-sight transmission, we have power radiating more effectively in other directions. This power can reflect off nearby conducting surfaces and arrive at the receiving antenna with as much strength as the line-of-sight signal. The reflection adds to the line-of-sight signal. It might reinforce the line-of-sight signal, or cancel it, depending upon their relative phase.
The phase difference between a reflected and line-of-sight wave is a strong function of frequency. If the reflected path length is three meters long, this is a hundred wavelengths. A 1% change in frequency will cause a 2π change in phase. A 0.25% change in frequency will cause a π/2 change in phase. The figure below shows two holes in the response of our our Demodulating Receiver (A3017). The antennas are 1 m apart, on either side of our body.

We see that each hole is about 1 MHz wide. A 0.1% change in frequency causes the cancellation to stop. We take such sharp holes in the frequency response to be evidence of multi-path interference. The width of the holes is consistent with a reflected path length of several meters. Longer path lengths would give holes that were even more sharp. The two holes are separated by 24 MHz, and you will notice yet another hole, on the left side, which is 24 MHz below the middle hole. As the frequency changes by 24 MHz, the phase difference between the line-of-sight and reflected waves changes by 2π. The number of wavelengths in the path difference changes by one. Because the frequency changes by 2.5% to bring about this one-wavelength change, the path difference must be 40 wavelengths, or 12 m. This suggest to us that the wave is bouncing off one of the metal shelves five or six meters from our transmitting antenna. If that's the case, then the reflected signal will be about 25 dB weaker than the line-of-sight signal, except for the fact that our body is in the line of sight. Human tissue attenuates 900 MHz by approximately 1 dB/cm, so we expect a loss of around 25 dB through a human torso. Both signals are each strong enough for reception, but they cancel one another at particular frequencies.
With 10 dB loss due to cancellation by reflections occurring at the same time as 17 dB loss due to poor antenna orientation and 32 dB loss due to transmission across 1 m of air, our signal drops to −63 dBm, which is only 5 dB above our −68 dBm interference. Reception will fail. With a favorable orientation of the transmitter, however, we can expect −36 dBm at 1 m, and − 56 dBm at 10 m. Even at 10 m, we can receive a signal that is 12 dB above our interference. In fact, we find we can get reliable reception at up to 15 m in our lab by orienting the transmitter properly.
[04-MAR-16] The receiver can fail to identify the message in its incoming bit stream (see Signal Path), even though they are received clearly by the Demodulating Receiver. The receiver might be occupied with something that looks like a message, and when the real message arrives, all it knows is that the previous message was invalid. The receiver goes back to looking for a new message, but is too late to identify the real message. We measure the rate at which the receiver loses messages by putting a single transmitter next to the antenna and watching for missed messages. Our signal is strong and there are no other transmitters to collide with it. We assume that any missing messages have been lost in the receiver. It turns out that the number of synchronizing bits that the receiver requires at the beginning of a message is what dictates the missing messages rate.
| Number of Synchronizing Bits | Missing Message Rate |
|---|---|
| 2 | 1.2% |
| 4 | 0.5% |
| 5 | <0.2% |
Only after it has received its required number of synchronizing bits does the receiver proceed to message recording, and it will lose an incoming message only if it is already recording a false message. By insisting upon five synchronizing bits, we ensure that the receiver loses less than one in a five hundred messages. As it turned out, we settled upon 11 synchronizing bits because this improved the performance of the system when the signal was weak.
We placed a single transmitter within a Faraday enclosure, on an upturned paper cup 10 cm from the antenna within a Faraday enclosure. We recorded continuously for an hour. Average reception was 99.7%. When we turn off the transmitter, the bad message rate is less than 0.1%. We conclude that roughly 0.3% of message are being blocked.
Each transmitter, when active, transmits messages in a continuous stream. The A3019A transmits 512 sixteen-bit data samples per second. A message that the receiver fails to receive is a missing message.
The Neuroplayer Tool handles missing messages by creating a substitute message with equal data sample value to the previous message received from the same transmitter. It does this only for the channels you are recording.
Despite the Neuroplayer's message substitution, missing messages degrade the effective bandwidth and quality of our received signals. But they do not cause catastrophic problems, nor do they confuse our data acquisition system, which can rely upon a guaranteed stream of messages from each transmitter it monitors.
The primary cause of missing messages is lack of signal strength at the antenna when compared to ambient interference power, as we discuss in Ambient Interference. The primary cause of loss of signal strength is cancellation of the RF signal by its own reflections arriving at the antenna, as we discuss in Operating Range. The primary source of ambient interference is cordless phones operating in the 902−928 MHz band, and mobile phones operating in the frequency bands immediately above and below the 902−928 MHz band. Even if such mobile phones transmit only 1% of their power outside their designated frequency bands, they will still combine to produce substantial interference in neighboring bands. Another source of interference is other subcutaneous transmitters, in which case we refer to the interference as a collision.
Mobile phone interference in the ION laboratory in London, which is on the eighth floor of a building, was so severe that reception from an implanted transmitter at range 50 cm would sometimes drop as low as 20%, and was rarely above 80%. With the help of one of our Faraday enclosures, reception jumped up to an average of 99%, with a minimum of 98% during any four-second period.
[04-MAR-16] Noise and interference can generate messages on their own. We call these bad messages. Bad signals can raise false alarms, spoil the scale of self-adjusting displays, and wreak havoc with your Fourier Spectrums. We have made every effort to avoid them.
Bad messages have a valid transmitter ID number, but their data is invalid. The Receiver Instrument rejects them when they occur with ID numbers you have not asked it to record.
The bad message rate in our laboratory is less than one per ten minutes when there are no transmitters active. In London, the bad message rate was roughly one per second, sometimes coming in bursts of ten in a second. With transmitters active, we find that some messages get corrupted, as we describe below, and these message become bad messages.
We spend the rest of this section showing how bad message can, in theory, arise from noise and interference, and how our message encoding makes such bad messages very unlikely.
As we describe in Signal Path, the receiver monitors a logic signal called SC, looking for messages. These messages could arrive at any time. If the stream of bits is random, there is a chance it will generate a message by chance. If the stream of bits has some pattern to it because of radio interference, the chance of a message appearing in it at random might be much higher.
When we disconnect the receiver's antenna, and replace it with a 50-Ω terminator, we stop radio signals from reaching our receiver. All that remains at the input to our RF amplifier is white noise, whose power in our radio-frequency passband is around −87 dBm. The receiver amplifies this noise until it is large enough to generate an active pattern of zeros and ones on SC. This alternation is random, because the white noise is random. The output of the Demodulating Receiver (A3017) is an analog signal, S. This signal is sharply bandwidth-limited by the Demodulating Receiver's radio-frequency passband, and mildly high-pass filtered when it enters the receiver. The receiver uses a comparator to generate the logic level SC from S. When we examine SC on an oscilloscope with the antenna disconnected, the bandwidth of the bit stream is around 10 MHz, which we determine with the help of various low-pass filters.
Our messages represent individual bits values as edges in SC, not as levels of SC. An edge is a transition from logic LO to HI or from HI to LO. A rising edge is a one, and a falling edge is a zero. A sequence of synchronizing one-bits at the beginning of the message tells the receiver when to look for data-carrying edges, because it knows the rising edges in the synchronizing sequence are the data edges in these initial one-bits. Every subsequent data-carrying edge allows the receiver to adjust its expectations for when the next data-carrying edge will arrive. With a 5 MBPS bit rate, the data-carrying edges are separated by 200 ns. Each bit takes roughly 8 periods of our 40-MHz message clock. We say "roughly" because the bit rate is not exact. The transmitter's message clock is generated by a ring oscillator, and is accurate to only ±10%.
If the receiver detects an edge within one or two clock periods of another, it rejects the entire message and goes back to looking for synchronizing bits. It rejects synchronizing bits using the same constraint. The receiver tests the level of SC for premature edges twice during each bit period. In order for a random sequence of bits to create a valid message, it must satisfy both tests for all bits of the message. There are around 25 bits in the message, so the random stream must take on the correct value 50 times. Furthermore, the message must have the correct checksum at the end, which is the same as saying that it must take the correct value for another five bits.
The likelihood of a random sequence on SC matching our message protocol is roughly 0.530. To the first approximation, there are 105 opportunities for the match to occur every second, because each message occupies roughly 10 μs. We expect our bad message rate from noise and random interference to be of order one per hour. And indeed this is what we observe: after running for ten minutes we saw no bad messages with the antenna disconnected.
Most interference, however, is not random. It is generated by communication devices and its purpose is the transfer of information in a regular fashion. Such interference can have a far greater probability of creating a bad message than random interference. In a basement laboratory with −68 dBm interference power in the 902-928 MHz band, we recorded the number of bad messages in consecutive one-second intervals with a Data Recorder (A3018C). We used no Faraday enclosure, and no transmitters were running nearby.

The average number of bad messages per second was 1.1 and the standard deviation was 2.5. Given that we expect to receive of order 500 messages per second from active transmitters, this bad message rate is not significant.
[04-MAR-16] A corrupted message is one that has been interfered with, but which still passes through our error-checking. A corrupted message has the same effect upon data acquisition as would a bad message with the same ID.
We can reduce the likelihood of message corruption by checking for errors in the content of the message, as opposed to only by comparing the final four bits to the first four bits. A four-bit cyclic redundancy check at the end of all transmitted messages would give us better rejection of corrupted messages. Instead of ending up as bad messages, most corrupted messages would end up as missing messages. But the cyclic redundancy check would make our Stage Four transmitters incompatible with those of Stage Three, so we decided to tolerate a higher than necessary corrupted message rate for the sake of backward-compatibility.
The text below is a list of messages between one clock message and the next, taken from data recorded from a system with six active A3013A transmitters (starting time 71.0625 s in archive M1288538199.ndf). Each line represents one message, either a clock (ID 0) or a sample (IDs 1 to 14). We give the message index, the channel number, the sample value, the timestamp, and the hexadecimal representation of the four message bytes.
24 0 7050 5 $001B8A05 25 8 42595 0 $08A66300 26 12 43431 26 $0CA9A71A 27 7 43084 31 $07A84C1F 28 10 40959 43 $0A9FFF2B 29 8 42613 53 $08A67535 30 12 405 83 $0C019553 31 7 43100 90 $07A85C5A 32 6 42185 92 $06A4C95C 33 4 180 106 $0400B46A 34 10 40987 115 $0AA01B73 35 8 42615 126 $08A6777E 36 12 43416 160 $0CA998A0 37 6 42111 160 $06A47FA0 38 7 43116 162 $07A86CA2 39 5 42234 169 $05A4FAA9 40 10 40988 177 $0AA01CB1 41 8 42661 191 $08A6A5BF 42 7 43197 218 $07A8BDDA 43 12 43330 221 $0CA942DD 44 6 42310 235 $06A546EB 45 10 41052 242 $0AA05CF2 46 8 42689 246 $08A6C1F6 47 0 7051 5 $001B8B05
These messages were recorded inside Faraday enclosures, so interference from non-telemetry sources is minimal. Message 30 is a corrupted message from No12 in which the ID has remained the same. This corruption gives rise to a glitch in the No12 signal. Message 33 has ID 4, but there is no No4 transmitter in the system. We suspect that a message from No5 was corrupted in such a way as to appear as a message from No4.
The above errors occur more often when the signal from one or more transmitters is exceptionally weak. The errors manifest themselves as spikes in the signal. Because they are rare, we can remove them with a glitch filter. More of a problem than the spikes is the poor reception that goes with the weak signals that cause spikes.
[27-JAN-17] When two transmitters send a message at the same time, we say that they collide. When two transmitters collide, we can lose one or both of their messages. Consider message detection by a single antenna amplifier, as is the case with our original Data Receiver (A3018). If the first message is much more powerful than the second message arriving slightly later, the second will be lost. The second message will become a missing message. But the first message will be received correctly. If the second message is more powerful than the first, it will interfere successfully with the first, preventing its reception. The second message may also be lost, depending upon how fast the message detector can recognize and recover from the corruption of the first message. If the two signals are of equal power, neither will be received. If we have two or more independent receiving antennas, we can hope to detect both messages. The Octal Data Receiver (A3027) provides eight receiving antennas, each with its own amplifier, demodulator, and message detetor. Collisions occur at each of the antennas, but the outcome of the collision differs from one antenna to the next, so that the rate at which we lose messages to collisions is reduced.
Collisions occur because two transmitters are transmitting at the same time. If the transmission period were exactly regular, and two clocks drifted into exactly coincidence, collisions could occur systematically at every transmission instant. But the transmission period is not regular. The average period is exact, but the moment of each individual transmission is displaced by the transmitter by a small, random, amount of time. In the A3038E, the transmission period is 64 cycles of its 32.768 kHz clock, or 1952 μs. The A3028E delays its moment of transmission by 0 to 15 clock cycles, so that the actual moment of transmission can be delayed by up to 456 μs. Or we can regard the moment of transmission as being displaced by ±240 μs about its nominal value.
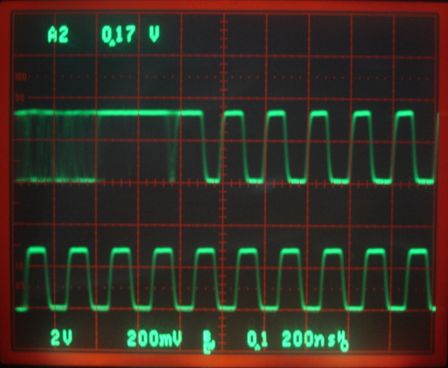
We call the displacement of the transmission instant transmission scatter. We describe how the data acquisition system handles transmission scatter in our Recorder Manual. The transmitter uses the lower four bits of its sixteen-bit ADC conversion as the source of a random number. The figure below shows transmitter scatter on the oscilloscope screen.

We describe in more detail how the hardware implements the scatter in the Transmission section of our A3013 Manual. We describe the distortion of the analog signal that results from transmission scatter in the section Analog Inputs.
Faraday enclosures provide isolation of transmitters from ambient interference, and also from transmitters that do not share the same receiver. If we have eight transmitters in four separate Faraday enclosures, each Faraday enclosure will have its own antenna. We combine the signals from the six antennas and feed the combination into our Data Receiver (A3018) using an Antenna Combiner (AC4A). Transmitters in these six enclosures will interfere with one another whenever their transmissions overlap.
At 512 SPS, the transmission period is 1952 μs and the transmission itself lasts for only 7 μs. Each transmitter transmits for 0.35% of the time. The chance of one 7-μs transmission overlapping another is 0.7%. The average loss due to collisions when we have n transmitters sharing the same receiver is (n-1) × 0.7%. If we have If we have twelve transmitters sharing a receiver, we will lose roughly 8% of messages to collisions when averaged over a long time period. We say the average collision loss is 8%.
The collision loss varies with time, as shown in the following graph. Its average value may be only 0.7% for two transmitters, but it's peak value can be ten times higher.

In the above graph, we see cyclic variation in reception caused by a slight difference in the transmitter clocks. Over the course of eighteen minutes, the cycles grow in amplitude from 1% to around 8% and shrink again. Another twenty minutes goes by with no evidence of collisions, and the collision cycles begin again.
The period of message transmission at 512 SPS is roughly 2 ms (64 cycles of the transmitter's 32.768 kHz oscillator). An entire collision sequence, such as the thirty-six minute sequence captured in the figure above, takes place as the two clocks drift with respect to one another by 2 ms. The ASH7KW clock we use on the A3028 is accurate to ±20 ppm over its entire temperature range. We expect differences between the clocks of 5 ppm to be common. In the example above, it takes 2200 s for the two clocks to drift apart by 2 ms. The two clocks differ by 0.9 ppm. This combination of clocks is unusual. More often we see collision cycles of period several hundred seconds, like this one taken from transmitters in live animals at ION in London.
The individual cycles in the above sequence have period thirty seconds, as we can see in the following figure.

Each cycle corresponds to a drift of 30.5 μs between the two clocks (one period 32.768 kHz). Because our clocks are only 0.9 ppm apart, we get a 34-s cycle. We see the structure of the cycle clearly. There is a 18-s period with no collisions in each cycle, and a 16-s period where the collisions take place.
The first period of collisions in the entire collision sequence begins when the earliest transmission window of one transmitter coincides with the last transmission window of the other. In our case, the two 7 μs windows overlap for 16 s (that's twice 7 μs divided by 0.9 ppm). Collisions in this first period should be rare, because only one window overlaps. The chance of a collision should be 1/16 × 1/16 = 0.4%.
As we see in the oscilloscope trace above, the four-bit values the transmitters use for random numbers are not uniformly-distributed across their sixteen possible values. Furthermore, one transmitter might be so much stronger than another that the interference is only one-way. In our example sequence, we see the first cycle has a depth 6% for No4 and 0% for No11. The peak cycles have depth 8% for both transmitters.
The second cycle of collisions occur 34 s after the first, when the clocks have drifted 30.5 μs to the next window overlap. Now the earliest window of one transmitter coincides with the second-to-last last window of the other. But now we have the second-earliest window coinciding with the last window as well. Our chance of collision is, in theory, 0.8%. The overlap lasts for 16 s, and 18 s later comes the next overlap. The chance of a collision is 1.2%. On the sixteenth cycle, all sixteen windows overlap, and the collision probability is 6%. The cycles shown in detail in the figure above are the largest in the collision sequence. Both transmitters experience a 6% drop in reception. Sixteen cycles after the peak, none of the windows overlap. The clocks drift another 1 ms apart over the next 1200 s and there are no collisions. Now the entire sequence starts again.
If we place n transmitters in the same Faraday enclosure, it is inevitable that their sixteen transmission windows will coincide at some point in time. At that time, the collision rate between transmitters will be at its greatest, and reception will be at a minimum. If we consider a message occurring in one of the windows, the probability of no other message occurring in the same window is 0.94(n−1). If we assume near-perfect reception in the absence of collisions, which appears to be the case in Faraday enclosures, this probability is the minimum reception rate for the n transmitters.
| Number | Average (%) | Minimum (%) |
|---|---|---|
| 1 | 100.0 | 100 |
| 2 | 99.3 | 94 |
| 3 | 98.6 | 88 |
| 4 | 97.9 | 83 |
| 5 | 97.2 | 78 |
| 6 | 96.5 | 73 |
| 7 | 95.8 | 69 |
| 8 | 95.1 | 65 |
| 9 | 94.4 | 61 |
| 10 | 93.7 | 57 |
| 11 | 93.0 | 54 |
| 12 | 92.3 | 51 |
| 13 | 91.6 | 48 |
| 14 | 90.9 | 45 |
For robust reception we need to receive more than 80% of messages for 95% of the time (robustness of 95% or higher). It's not obvious from the minimum and average reception values whether reception will be robust. To obtain a good estimate of robustness, we simulated the collision cycles of n transmitters. Our simulation program, collisions_1.pas, simulates sets of n transmitters working together with randomly-distributed clock periods over a period of two thousand seconds. The figure below shows reception from the first four transmitters in a set of fourteen.
When the simulation begins, all clocks are synchronous, and we obtain the minimum reception. After that, the interactions between the clocks become complex. For a 100-s detail, see here. For each simulation of n transmitters, we obtained n values for minimum reception, average reception, and robustness. These values were consistent from one transmitter to the next to within a few percent, so the values we give in the table below are the average values taken over the n transmitters.
| Number | Average (%) | Minimum (%) | Robustness (%) |
|---|---|---|---|
| 1 | 100.0 | 100.0 | 100.0 |
| 2 | 99.2 | 91 | 100.0 |
| 3 | 98.0 | 87 | 100.0 |
| 4 | 97.8 | 84 | 100.0 |
| 5 | 96.2 | 79 | 100.0 |
| 6 | 95.6 | 72 | 99.8 |
| 7 | 95.2 | 72 | 99.8 |
| 8 | 94.4 | 68 | 99.6 |
| 9 | 94.0 | 62 | 99.3 |
| 10 | 92.7 | 57 | 98.5 |
| 11 | 92.2 | 58 | 98.2 |
| 12 | 91.5 | 52 | 97.3 |
| 13 | 90.7 | 52 | 89.0 |
| 14 | 89.9 | 50 | 81.7 |
Robustness is greater than 95% all the way up to n = 12, so the collision tolerance of a set of 512 SPS transmitters is 12. This is why we talk about 12 transmitters sharing a single receiver in other sections. Robustness for n ≤ 5 is 100%.
In our simulation, we assume that any collision between two transmitters will result in the loss of both messages. This is not true in practice. If the power received from one transmitter is 12 dB greater (16 times greater) than the power received from another, the more powerful signal will dominate. If reception of the more powerful signal is taking place, the weaker signal will be ignored. If the weaker signal is being received, there is a good chance that the receiver will have time to abandon the weaker message and receive the stronger message. In our recording of two stationary transmitters, shown here, we see that fewer messages are lost from No7 than No4. Transmitter No7 is in air with an 80 mm antenna. Transmitter No4 is in water with a 50-mm antenna. We assume the signal from No7 is stronger than that from No4.
The following graph shows measured transmission over the course of half an hour with nine active transmitters.

Average reception over the half-hour period was 92% for No3 and 99% for No1, with the others in between. The minimum reception observed in any four-second period was 71% from No2 and 94% for No1, with the others in between. Reception is almost always greater than 80% for all transmitters, so we conclude that we obtain robust reception from nine transmitters despite collisions.
All these calculations assume that we have only one antenna amplifier and demodulator with which to detect all transmitted messages. But the Telemetry Control Box (TCB) provides sixteen independent antennas. When two transmitters collide but are in different locations, both messages are likely to be received correctly because at each location one transmitter dominates over the other. We placed nine transmitters of various sample rates in a Faraday enclosure, emitting a total of 8192 SPS, and received their messages with three independent antennas. We observe an average loss of 4%. Our simulation suggests a loss of 12% at each of the antenna. When we place 12 of A3038L in an FE3A enclosure with four independent antennas, each transmitter emits 2048 SPS, so we have the equivalent of 44 transmitters of 512 SPS. Average loss is 10%.
[06-JAN-25] We encapsulate transmitters in epoxy and coat them in silicone. For an account of our initial work on rugged encapsulation that is resistant to water, fatigue, and vacuum, see our Development of Encapsulation page. Our encapsulation procedure does not use molds. We dip the circuits in epoxy while in a vacuum. We allow air into the vacuum to force the epoxy in and around all components. We rotate the transmitter while the epoxy cures, and later dip several times in a medical-grade silicone dispersion to provide a resiliant outer coating. Encapsulating by dipping produces a far smaller device, and we can adapt our procedure easily to new shapes.
In the Summer of 2024, we conducted a study of stainless steel enclosures for use in long-term studies in large animals. We concluded that an epoxy-sealed, close-fitting cover and base enclosure, with drilled holes, and ceramic feedthroughs, should be able to provide a dry environment for the internal electronics for at least five years. We have not yet received a request for a five-year lifetime device for large animals, but if we did, we would purchase a custom size stainless steel enclosure and coat it with silicone.
[24-OCT-24] The disadvantage of epoxy and silicone is that they are permeable to water vapor, so that it is possible for water to condense within the circuit. In the warm body of an animal, condensation causes corrosion. We select roughly one in ten of the transmitters we manufacture and subject them to accelerated aging in hot water, where they run for weeks or months until corrosion stops them from functioning. We take them out every other day and handle them and check that they are functioning correctly. The OSI product warantee guarantees our implantable devices against corrosion for their minimum operating life or for one year after we ship them, whichever is greater.

Animals will sometimes scratch at stitches and incisions. When they scratch so vigorously as to penetrate their own skin, their claws tear at the silicone coating of their implanted SCT. Once the silicone is breached, water penetrates to the epoxy coating beneath the silicone. Current can flow from the battery terminal, through a breech in the silicone, to the reference electrode of the SCT, thus completing a circuit that causes corrosion on the battery surface. After a week we will see brown and green oxide beneath the silicone.

The current that flows through the breech in the silicone will be of order a few microamperes. The transmitter battery will drain slighly more quickly. In the case of a transmitter like the one shown above, operating life may drop from 40 days to 35 days. But the breech will corrupt the signal recorded by the transmitter. As the animal moves, the breech will flex, changing the current that flows through it, and generating movement artifact of several hundred microvolts in the recorded signal. The generation of this artifact is so reliable that we use its generation to check for flaws in the coatings of newly-made transmitters. We soak the transmitters in water for several days, then transfer them to hot water, and look at the signals they transmit, watching for the steps and swings that reveal a silicone breech.
The silicone coating on our transmitters is roughly 0.5 mm thick. We want the silicone to be tough enough to endure handling, dropping on the floor, implanting, and explanting without the silicone tearing or cracking. The thicker we make the silicone, the tougher the coating will be. But the ticker the silicone, the greater the volume of the transmitter. The larger the transmitter, the more likely it is to irritate its host animal. Once an animal is so irritated as to scratch open an incision, the study of that animal is over. Thus, we do not equip our implants with silicone thick enough to survive being scratched repeatedly, let alone bitten.
Our standard encapsulation involves several coats MED-6607 unrestricted medical grade silicone. The humidity and air flow around the transmitter while the silicone is curing is critical to the uniformity and clarity of its appearance, but less critical to its performance as a coating. If something goes wrong with climate control in our curing chamber, one of the layers, usually the first layer, will wrinkle, and the result is an ugly transmitter like the one shown below.

We have poached dozens of transmitters like the one shown above in water at 60°C to test their corrosion resistance. The ugly transmitters are just as tough and long-lived as the good-looking transmitters. Nevertheless, we won't ship ugly transmitters without warning, and we will hold them back and replace them if our customer requests us to do so. They carry the same one-year warranty as all our implantable devices.
[05-FEB-20] When we implant a transmitter and its leads in an animal body, there exists a capacitance between the transmitter circuit and the animal body, and also a capacitance between the lead wires and the animal body. The capacitance between the circuit and the animal body has for its dielectric the epoxy and silicone used to encapsulate the transmitter. This capacitance is of order 10 pF. The capacitance between the lead wires and the animal body has for its dielectric the silicone insulation of the leads. This capacitance is of order 10 pF/cm, and therefore dominates the total capacitance between the transmitter and the animal body. We show how we estimate and measure these capacitances in the Body Capacitance section of one of our early transmitter manuals.
[19-FEB-25] In 2004, we prepared our Technical Proposal for Subcutaneous Transmitter, in which we laid out our plan to develop a transmitter small enough to be implanted in the body of a rat, fast enough to transmit four hundred samples per second, powerful enough to be detected at a range of three meters, and efficient enough to operate for three months on a lithium battery that would fit under the rat's skin. We divided our development into four stages. Three further stages emerged once we had embarked upon the development: water penetration into the encapsulation, fatigue failure of the leads, and excessive electromagnetic interference from mobile phones.
The electronics of Stage Four were ready in March of 2007. It was then that we confronted the problem of robust, water-proof encapsulation for the transmitters. At the time we wrote our Technical Proposal, we believed that two coats of silicone dispersion would be adequate to water-proof the transmitter circuit. Given the simplicity of the procedure, there would be no point in coating the transmitters ourselves. We proposed to send transmitters to our users without batteries, wires, or coating. Our user could solder their preferred wires to the transmitters, install the battery, and apply the coating.

Water-proof encapsulation is difficult. Capillary action makes water a relentless invader of any opening or crack. During encapsulation, air bubbles trapped beneath components emerge into the curing encapsulation. In the low pressure of an aircraft cargo hold, the bubble beneath the battery pushes outwards, and will burst an encapsulation made of silicone. After nine months of work on encapsulation, we arrived at a process that uses both epoxy and silicone. We made our first transmitters with epoxy and silicone with in December 2007. We describe our early work on encapsulation in our Development of Encapsulation report. We continue to make incremental improvements to the encapsulation procedure, which we report on in the various transmitter development pages.

Once our transmitters were water-proof, they endured for long enough in live animals for the wires to break from repetitive stress. Wires broke at the neck of a rat, at their solder joints, and where they emerged from epoxy encapsulation. We describe our work on wire fatigue in our Subcutaneous Leads report. In Spring 2009 we began trials using a variety of steel wires, including steel springs. We eventually settled upon helical steel wires for the input leads and a stranded wire for the antenna. We insulate both with silicone, and this insulation forms part of the outer cover of the transmitter body.

Interference with our subcutaneous transmitter signals from outside sources proved to be a problem in ION's London laboratory. We solved the problem of interference with Faraday enclosures. We describe the development of a practical Faraday enclosure, and document its success, in Faraday enclosures. Faraday enclosures are now an integral part of the subcutaneous transmitter system. Not only do they provide immunity to outside interference, but they allow many transmitters to operate simultaneously in the same space without interfering with one another.
At the end of October 2013, we had prototypes of our new Dual-Channel EEG Monitor (A3028). This circuit was in production until early 2023, when we finally replaced it with the Subcutaneous Transmitter (A3049). At the end of 2013, we \were building the first of our Octal Data Receivers (A3027), another circuit that continued in production until 2023, when it was replaced by the Telemetry Control Box (A3042).
Our original telemetry system supported only fourteen telemetry channel numbers, which restricted each telemetry system to only fourteen single-channel transmitters, or seven dual-channel transmitters. In January 2017, we introduced updated transmitter and receiver firmware that supported channel numbers 0-255, while reserving two out of every sixteen channel numbers for other uses. Now we can record from 196 channels in the same telemetry system.
In 2016 we built the first Animal Location Tracker (A3032A). These new receivers were designed to measure the position of animals over a 16 cm × 32 cm platform with accuracy ±1 cm. They failed to fulfil this expectation, but they did prove capable of measuring activity, proximity, and direction of movement. The original A3032 was complex to set up and use. We replaced it with the Animal Location Tracker (A3038A, ALT) in 2021. The A3038 is a Power-over-Ethernet (PoE) device requiring only one network cable for both power and signals. It is easy to set up and provides reliable reception and activity measurements.
We developed the Implantable Sensor with Lamp (A3030D) in 2014. It did well receiving commands, transmitting biopotential, and genearting optical stimuli, but the biopotential recording was chronically corrupted by artifact from the lamp power. We worked for years on ways to eliminate this artifact, even going so far as to build an ISL with two batteries and an opto-isolator between two circuits in the same encapsulation. But none of these efforts were satisfactory. In the end, we separated the stimulation and sensing into two devices, so that we now have an Implantable Stimulator-Transponder (A3041) that operates with co-implanted SCTs.
The A3038 ALT was our first receiver with Power over Ethernet, and as a result greatly simplifies the set-up of the telemetry system. To support recording from eight ALTs at a time, we made some changes to our data acquisition software. Until 2021, recording and playback of telemetry signals was performed by the Neuroarchiver Tool. In 2021 we split the Neuroarchiver into two parts: Neuroplayer and Neurorecorder. These two processes run in independent processes. We no longer have to worry about recording and playback interfering with one another, nor one recording affecting another, because each Neurorecorder runs in a separate process.
In March 2022 we released the Head-Mounting Transmitter (A3040, HMT), which mounts by connector to the skull of an animal, and has a battery we can replace. Each animal receives an Electrode Interface Fixture (EIF), to which we attach the HMT. It remains to be seen if the HMT can be reliable enough to provide data for a published paper. Mice have a habit of pulling off and chewing the transmitter. The prevailing opinion among implanters is that animals with HMTs cannot be co-housed together. Nevertheless, many fine recordings have been made with the HMT.
In October 2022 we began shipping the Telemetry Control Box (TCB-A16). This receiver provides sixteen independent coaxial antenna inputs, compared to the ODR's eight inputs. It provides a "top antenna" power measurement and identification number, so that know which antenna received the strongest signal from all channel numbers, and how strong that signal was. The TCB is not a location tracker, but it can give us the location of an animal in a maze or multi-chamber habitat. In July 2024, we completed the design and testing of the TCB-B16, which provides command transmission on all sixteen of its antenna connections as well as reception and top antenna measurement. The TCB-B16 not only receives from telemetry sensors, but provides commands for implants with command-receiving crystal radios. It is an all-purpose telemetry system that allows all our telemetry and radio-controlled devices to operate in the same space.
{kind=link}
{kind=link}
{kind=link}
{kind=link}